FSP example 1 : simple expansion¶
Overview¶
This example demonstrates an FSP solver with a very simple expansion strategy. In order to expand the domain, the domain is simply grown by adding all states reachable by making a sequence of state transitions, up to some maximum depth. This simple strategy leads to very large state spaces, but it works fine for the burr08 model, as it is a two-dimensional model with a limited number of states.
This simple expansion strategy is implemented by the module cmepy.fsp.simple_expander as follows:
"""
A simple domain expansion routine for the FSP algorithm.
"""
import cmepy.fsp.util
class SimpleExpander(object):
"""
Simple FSP expander that expands the entire domain.
The domain is expanded along the given transitions, up to the specified
depth.
"""
def __init__(self, transitions, depth):
"""
Simple FSP expander that expands the entire domain.
The domain is expanded along the given transitions, up to the specified
depth.
"""
self.transitions = transitions
self.depth = depth
def expand(self, **kwargs):
"""
Returns expanded domain states
"""
return cmepy.fsp.util.grow_domain(
kwargs['domain_states'],
self.transitions,
self.depth
)
Source¶
"""
example: uses Finite State Projection to solve the burr08 model
"""
from cmepy.models import burr08
import numpy
import cmepy.recorder
import cmepy.fsp.solver
import cmepy.fsp.simple_expander
import cmepy.domain
import cmepy.statistics
# fsp_example_util a common plotting routine for the three fsp examples
import fsp_example_util
def main():
"""
solve burr08 model using FSP with simple expansion approach
"""
# create model and initial states for domain
model = burr08.create_model()
initial_states = cmepy.domain.from_iter((model.initial_state, ))
# create simple expander for FSP expansion strategy
# - this expands the ENTIRE domain by 3, along the
# state transitions
expander = cmepy.fsp.simple_expander.SimpleExpander(
model.transitions,
depth = 3,
)
# create fsp solver for model, initial states, expander
# - time dependencies for the burr08 model are also supplied
fsp_solver = cmepy.fsp.solver.create(
model,
initial_states,
expander,
time_dependencies = burr08.create_time_dependencies()
)
# define time steps:
# this problem is initially stiff so
# we begin with some finer time steps
# before changing to coarser steps
time_steps = numpy.concatenate((
numpy.linspace(0.0, 1.0, 10),
numpy.linspace(2.0, 16.0, 15)
))
# we want the error of the solution at the
# final time to be bounded by epsilon
epsilon = 1.0e-2
num_steps = numpy.size(time_steps)
# define how much error is tolerated per step
max_error_per_step = epsilon / num_steps
# create recorder to record species counts
recorder = cmepy.recorder.create(
(model.species, model.species_counts)
)
domains = []
for i, t in enumerate(time_steps):
print 'STEP t = %g' % t
fsp_solver.step(t, max_error_per_step)
if i % 3 == 0:
print 'recording solution and domain'
# record the solution
p, _ = fsp_solver.y
recorder.write(t, p)
# store a copy of the domain so we can plot it later
domains.append(numpy.array(fsp_solver.domain_states))
print 'OK'
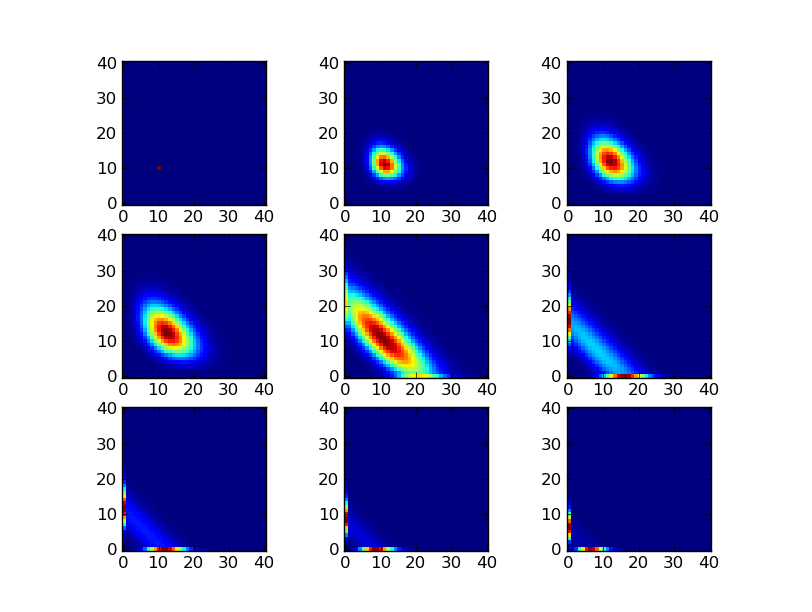
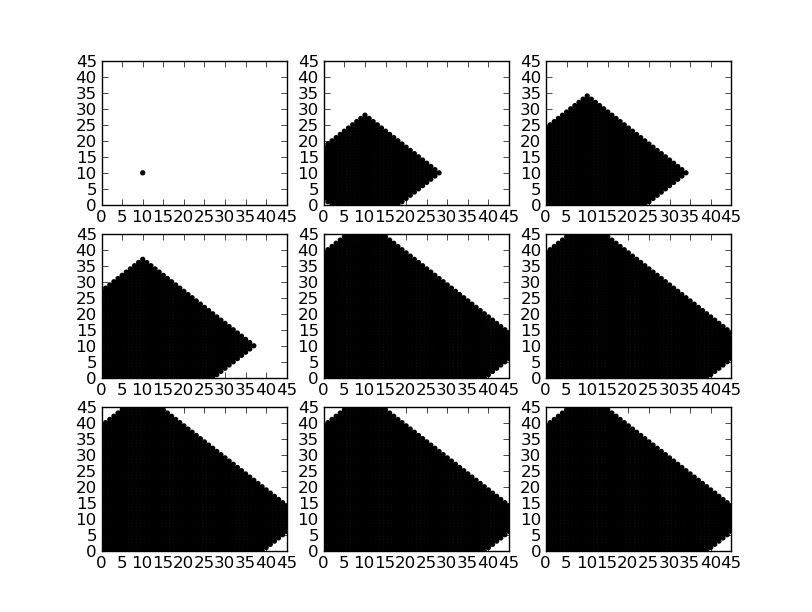
print 'plotting solution and domain'
fsp_example_util.plot_solution_and_domain(
recorder[('A', 'B')],
domains
)
if __name__ == '__main__':
main()